📷 Sensor
Description
Sensors play a crucial role in OmniGibson, as they facilitate the robots' observation of their environment. We offer two main classes of sensors:
ScanSensor: This includes a 2D LiDAR range sensor and an occupancy grid sensor.VisionSensor: This sensor type features a camera equipped with various modalities, including RGB, depth, normals, three types of segmentation, optical flow, 2D and 3D bounding boxes.
Usage
To obtain sensor readings, the get_obs() function can be invoked at multiple levels within our hierarchy:
- From
Environment: Provides- All observations from all robots
- All task-related observations
- Observations from external sensors, if available
- From
Robot: Provides- Readings from all sensors associated with the robot
- Proprioceptive observations for the robot (e.g., base pose, joint position, joint velocity)
- From
Sensor: Delivers all sensor readings based on the sensor's modalities. Additionally, our API allows for the simulation of real-world sensor behaviors by:- Adding noise
- Dropping out sensor values to emulate missing data in sensor readings
Besides the actual data, get_obs() also returns a secondary dictionary containing information about the data, such as segmentation labels for vision sensors.
For instance, calling get_obs() on an environment with a single robot, which has all modalities enabled, might produce results similar to this:
Click to see code!
data:
{
"robot0": {
"robot0:laser_link:Lidar:0": {
"scan": np.array(...),
"occupancy_grid": np.array(...)
},
"robot0:eyes:Camera:0": {
"rgb": np.array(...),
"depth": np.array(...),
"depth_linear": np.array(...),
"normal": np.array(...),
"flow": np.array(...),
"bbox_2d_tight": np.array(...),
"bbox_2d_loose": np.array(...),
"bbox_3d": np.array(...),
"seg_semantic": np.array(...),
"seg_instance": np.array(...),
"seg_instance_id": np.array(...)
},
"proprio": np.array(...)
}
"task": {
"low_dim": np.array(...)
}
}
info:
{
'robot0': {
'robot0:laser_link:Lidar:0': {},
'robot0:eyes:Camera:0': {
'seg_semantic': {'298104422': 'object', '764121901': 'background', '2814990211': 'agent'},
'seg_instance': {...},
'seg_instance_id': {...}
},
'proprio': {}
}
}
Observations
Vision Sensor
|
RGB RGB image of the scene from the camera perspective. Size: (height, width, 4), numpy.uint8 |

|
|
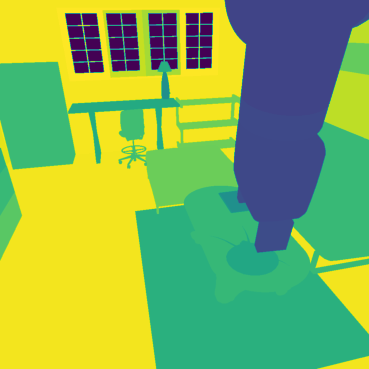
Depth Distance between the camera and everything else in the scene. Size: (height, width), numpy.float32 |
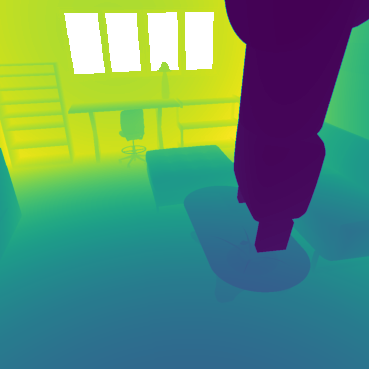
|
|
Depth Linear Distance between the camera and everything else in the scene, where distance measurement is linearly proportional to the actual distance. Size: (height, width), numpy.float32 |
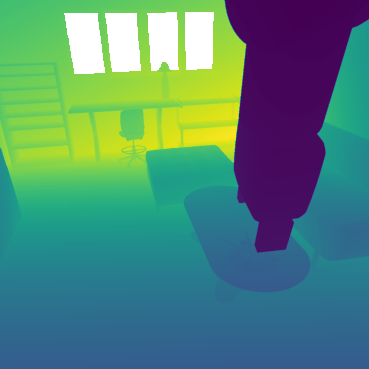
|
|
Normal Surface normals - vectors perpendicular to the surface of objects in the scene. Size: (height, width, 4), numpy.float32 |
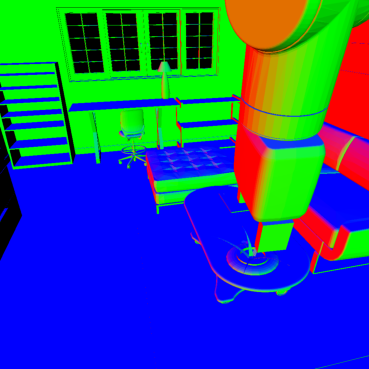
|
|
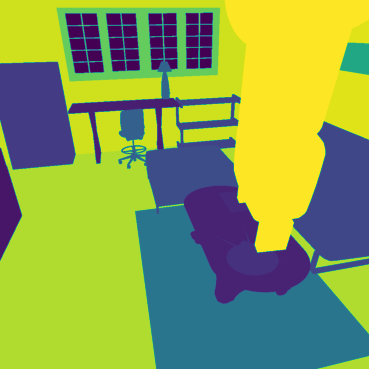
Semantic Segmentation Each pixel is assigned a label, indicating the object category it belongs to (e.g., table, chair). Size: (height, width), numpy.uint32 We also provide a dictionary containing the mapping of semantic IDs to object categories. You can get this here: from omnigibson.utils.constants import semantic_class_id_to_name |

|
|
Instance Segmentation Each pixel is assigned a label, indicating the specific object instance it belongs to (e.g., table1, chair2). Size: (height, width), numpy.uint32 |
|
|
Instance Segmentation ID Each pixel is assigned a label, indicating the specific object instance it belongs to (e.g., /World/table1/visuals, /World/chair2/visuals). Size: (height, width), numpy.uint32 |
|
|
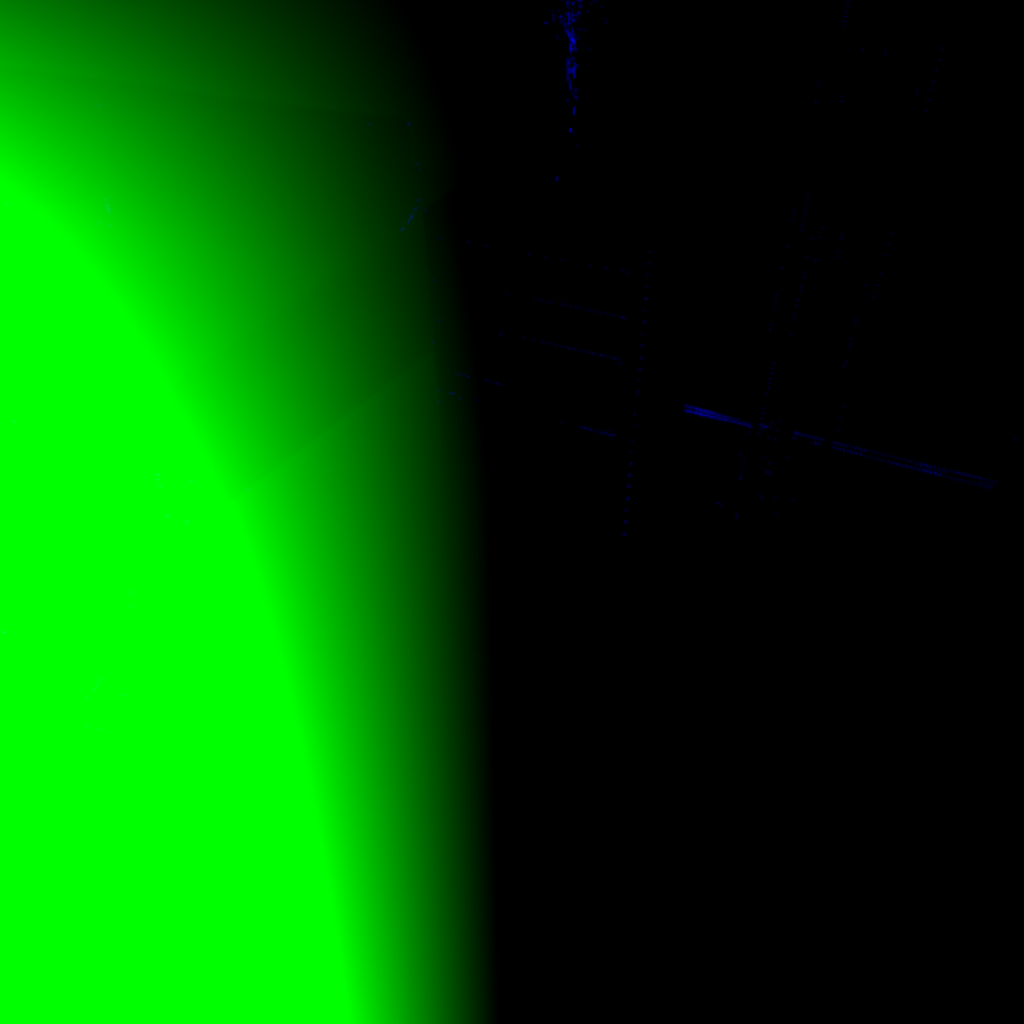
Optical Flow Optical flow - motion of pixels belonging to objects caused by the relative motion between the camera and the scene. Size: (height, width, 4), numpy.float32 |
|
|
2D Bounding Box Tight 2D bounding boxes wrapping individual objects, excluding any parts that are occluded. Size: a list of semanticID, numpy.uint32; x_min, numpy.int32; y_min, numpy.int32; x_max, numpy.int32; y_max, numpy.int32; occlusion_ratio, numpy.float32 |
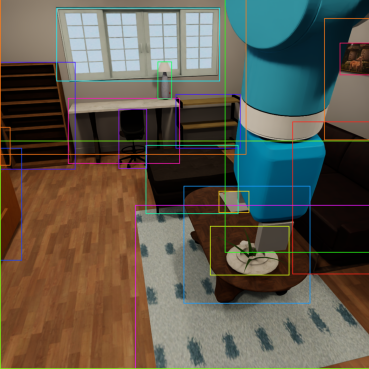
|
|
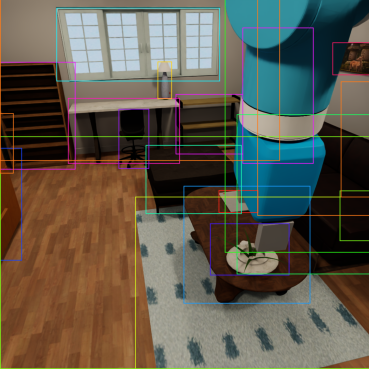
2D Bounding Box Loose 2D bounding boxes wrapping individual objects, including occluded parts. Size: a list of semanticID, numpy.uint32; x_min, numpy.int32; y_min, numpy.int32; x_max, numpy.int32; y_max, numpy.int32; occlusion_ratio, numpy.float32 |
|
|
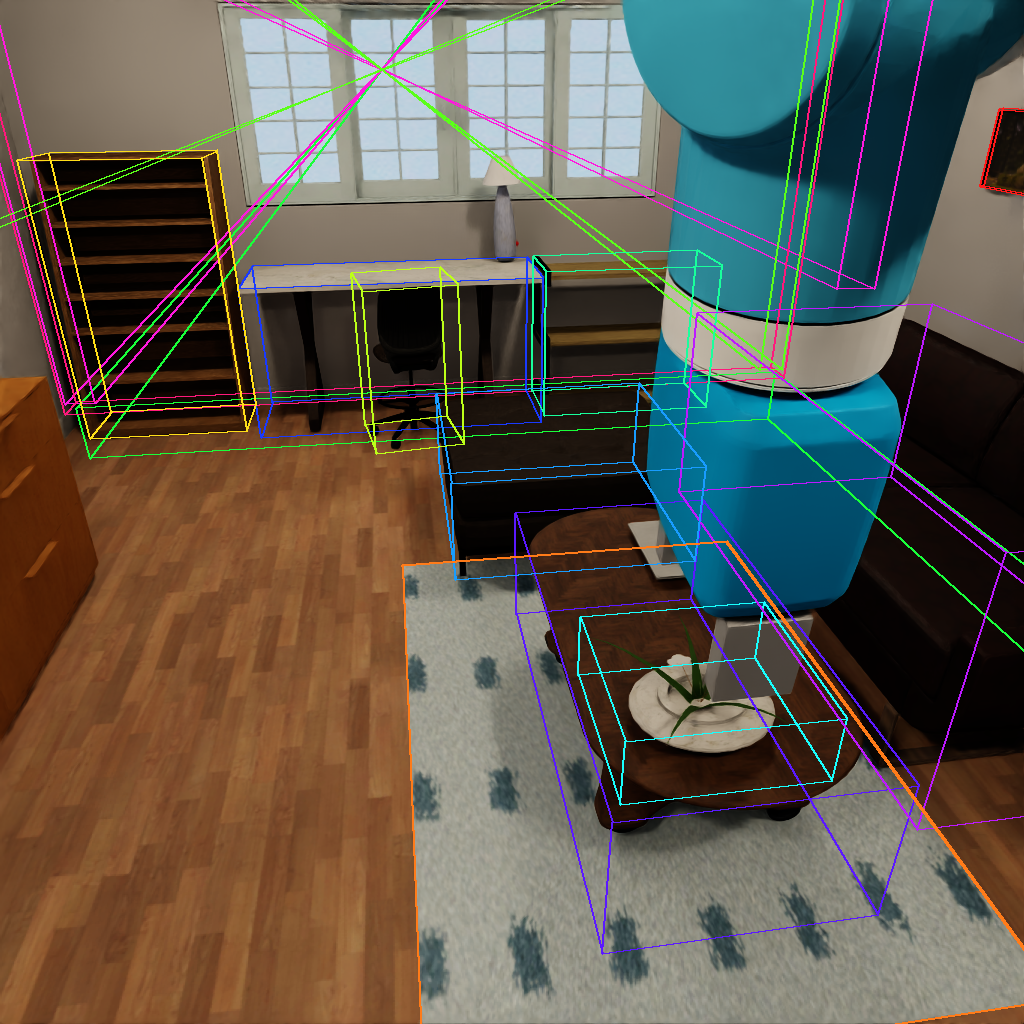
3D Bounding Box 3D bounding boxes wrapping individual objects. Size: a list of semanticID, numpy.uint32; x_min, numpy.float32; y_min, numpy.float32; z_min, numpy.float32; x_max, numpy.float32; y_max, numpy.float32; z_max, numpy.float32; transform (4x4), numpy.float32; occlusion_ratio, numpy.float32 |
|
Range Sensor
|
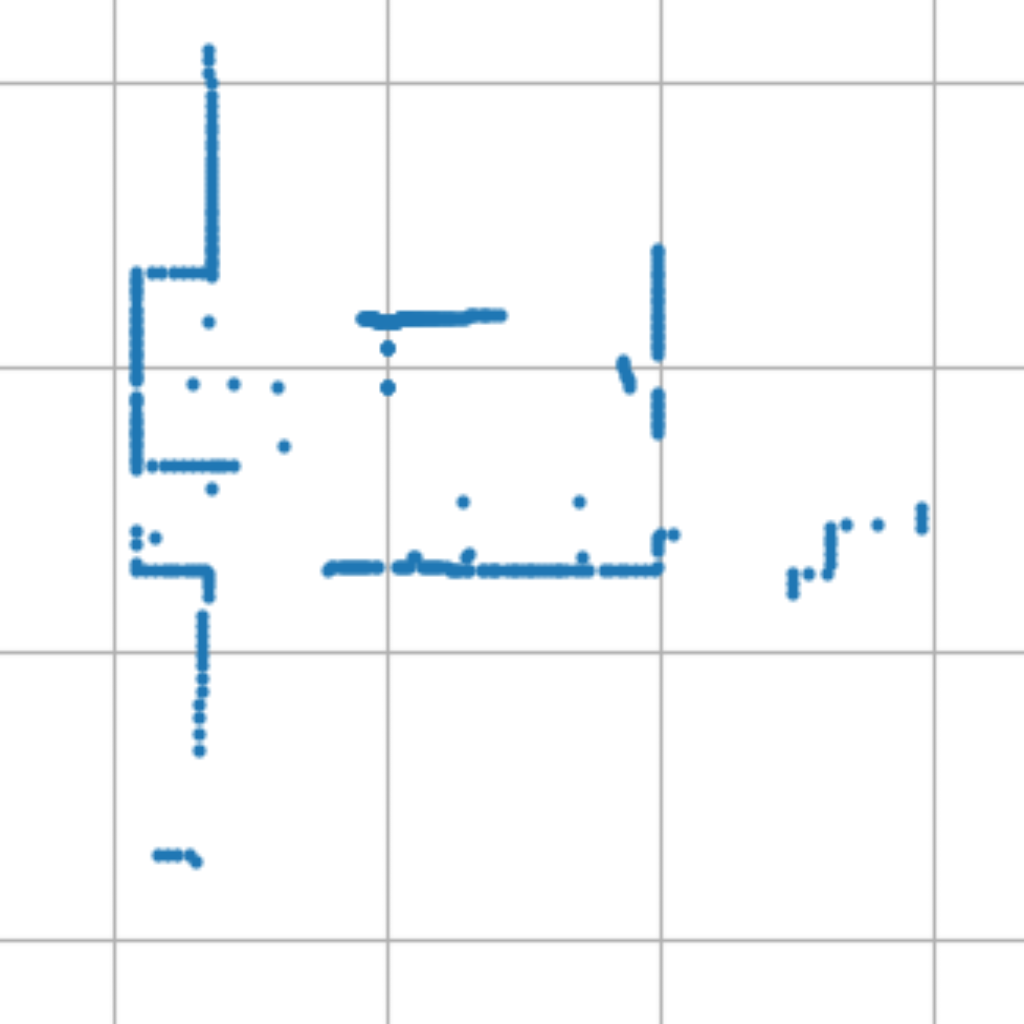
2D LiDAR Distances to surrounding objects by emitting laser beams and detecting the reflected light. Size: # of rays, numpy.float32 |
|
|
Occupancy Grid A representation of the environment as a 2D grid where each cell indicates the presence (or absence) of an obstacle. Size: (grid resolution, grid resolution), numpy.float32 |

|
Proprioception
|
Joint Positions Joint positions. Size: # of joints, numpy.float64 |
|
|
Joint Velocities Joint velocities. Size: # of joints, numpy.float64 |
|
|
Joint Efforts Torque measured at each joint. Size: # of joints, numpy.float64 |
|
|
Robot Position Robot position in the world frame. Size: (x, y, z), numpy.float64 |
|
|
Robot Orientation Robot global euler orientation. Size: (roll, pitch, yaw), numpy.float64 |
|
|
Robot 2D Orientation Robot orientation on the XY plane of the world frame. Size: angle, numpy.float64 |
|
|
Robot Linear Velocity Robot linear velocity. Size: (x_vel, y_vel, z_vel), numpy.float64 |
|
|
Robot Angular Velocity Robot angular velocity. Size: (x_vel, y_vel, z_vel), numpy.float64 |
Task Observation
|
Low-dim task observation Task-specific observation, e.g. navigation goal position. Size: # of low-dim observation, numpy.float64 |