🌡️ Object States
Description
In OmniGibson, ObjectStates define kinematic (such as OnTop, or Inside) or semantic (such as Temperature or Saturated) states for a given StatefulObject. These states enable finer-grained description of the scene at hand not captured by the raw simulation state (such as object and joint poses).
Every StatefulObject owns its own dictionary of states obj.states, which maps the object state class type to the object state instance owned by the object.
Object states have a unified API interface: a getter state.get_value(...), and a setter state.set_value(...). Note that not all object states implement these functions:
- Some states such as
Temperatureimplement bothget_value()andset_value()as a simple R/W operation, as this is merely an internal variable that is tracked over time. - Other states implement more complex behavior such as
OnTop, which infers spatial relationships between different objects duringget_value()and additional samples poses inset_value()such that the spatial relationship is true. - Some states such as
NextToonly implementget_value(), since setting these states are non-trivial and unclear to sample. - Finally,
IntrinsicObjectStates such asParticleApplier(which describes an object that can generate particles, such as a spray bottle) describe an intrinsic semantic property of the object, and therefore do not implementget_valuenorset_value.
OmniGibson supports a wide range of object state types, and provides an extensive example suite showcasing individual object states. For more information, check out our object state examples.
Object States must be enabled before usage!
To enable usage of object states, gm.ENABLE_OBJECT_STATES (1) must be set!
- Access global macros via
from omnigibson.macros import gm
Usage
Adding Object States
Object states are intended to be added when an object is instantiated, during its constructor call via the abilities kwarg. This is expected to be a dictionary mapping ability name to a dictionary of keyword-arguments that dictate the instantiated object state's behavior. Normally, this is simply the keyword-arguments to pass to the specific ObjectState constructor, but this can be different. Concretely, the raw values in the abilities value dictionary are postprocessed via the specific object state's postprocess_ability_params classmethod. This is to allow abilities to be fully exportable in .json format, without requiring complex datatypes (which may be required as part of an object state's actual constructor) to be stored.
By default, abilities=None results in an object's abilities directly being inferred from its category kwarg. OmniGibson leverages the crowdsourced BEHAVIOR Knowledgebase to determine what abilities (or "properties" in the knowledgebase) a given entity (called "synset" in the knowledgebase) can have. Every category in OmniGibson's asset dataset directly corresponds to a specific synset. By going to the knowledgebase and clicking on the corresponding synset, one can see the annotated abilities (properties) for that given synset, which will be applied to the object being created.
Alternatively, you can programmatically observe which abilities, with the exact default kwargs, correspond to a given category via:
from omnigibson.utils.bddl_utils import OBJECT_TAXONOMY
category = "apple" # or any other category
synset = OBJECT_TAXONOMY.get_synset_from_category(category)
abilities = OBJECT_TAXONOMY.get_abilities(synset)
Follow our tutorial on BEHAVIOR knowledgebase!
To better understand how to use / visualize / modify BEHAVIOR knowledgebase, please read our knowledgebase documentation!
Not all object states are guaranteed to be created!
Some object states (such as ParticleApplier or ToggledOn) potentially require specific metadata to be defined for a given object model before the object state can be created. For example, ToggledOn represents a pressable virtual button, and requires this button to be defined a-priori in the raw object asset before it is imported. When parsing the abilities dictionary, each object state runs a compatibilty check via state.is_compatible(obj, **kwargs) before it is created, where **kwargs define any relevant keyword arguments that would be passed to the object state constructor. If the check fails, then the object state is not created!
Runtime
As mentioned earlier, object states can be potentially read from via get_state(...) or written to via set_state(...). The possibility of reading / writing, as well as the arguments expected and return value expected depends on the specific object state class type. For example, object states that inherit the BooleanStateMixin class expect get_state(...) to return and set_state(...) to receive a boolean. AbsoluteObjectStates are agnostic to any other object in the scene, and so get_state() takes no arguments. In contrast, RelativeObjectStates are computed with respect to another object, and so require other_obj to be passed into the getter and setter, e.g., get_state(other_obj) and set_state(other_obj, ...). A ValueError will be raised if a get_state(...) or set_state(...) is called on an object that does not support that functionality. If set_state() is called and is successful, it will return True, otherwise, it will return False. For more information on specific object state types' behaviors, please see Object State Types.
It is important to note that object states are usually queried / computed on demand and immediately cached until its value becomes stale (usually the immediately proceeding simulation step). This is done for efficiency reasons, and also means that object states are usually not automatically updated per-step unless absolutely necessary. Calling state.clear_cache() forces a clearing of an object state's internal cache.
Types
OmniGibson currently supports 34 object states, consisting of 19 AbsoluteObjectStates, 11 RelativeObjectStates, and 4 InstrinsicObjectStates. Below, we provide a brief overview of each type:
AbsoluteObjectState
These are object states that are agnostic to other objects in a given scene.
AABBThe axis-aligned bounding box (AABB) of the object in the world frame.
|

|
VerticalAdjacency / HorizontalAdjacencyThe nearby objects that are considered adjacent to the object, either in the +/- global Z axis or +/- global XY plane.
|
|
BurntWhether the object is considered burnt or not. Note that if True, this object's visual appearance will also change accordingly. This corresponds to an object hitting some MaxTemperature threshold over the course of its lifetime.
|

|
ContactBodiesThe nearby rigid bodies that this object is currently in contact with.
|

|
CookedWhether the object is considered cooked or not. Note that if True, this object's visual appearance will also change accordingly. This corresponds to an object hitting some MaxTemperature threshold over the course of its lifetime.
|

|
Folded / UnfoldedA cloth-specific state. Determines whether a cloth object is sufficiently un / folded or not. This is inferred as a function of its overall smoothness, total area to current area ratio, and total diagonal to current diagonal ratio.
|
|
FrozenWhether the object is considered frozen or not. Note that if True, this object's visual appearance will also change accordingly. This corresponds to an object's Temperature value being under some threshold at the current timestep.
|

|
HeatSourceOrSinkDefines a heat source or sink which raises / lowers the temperature of nearby objects, if enabled. Use state.affects_obj(obj) to check whether the given heat source / sink is currently impacting obj's temperature.
|

|
HeatedWhether the object is considered heated or not. Note that if True, this object's visual appearance will also change accordingly with steam actively coming off of the object. This corresponds to an object's Temperature value being above some threshold at the current timestep.
|

|
MaxTemperatureThe object's max temperature over the course of its lifetime. This value gets automatically updated every simulation step and can be affected by nearby HeatSourceOrSink-enabled objects.
|
|
OnFireWhether the object is lit on fire or not. Note that if True, this object's visual appearance will also change accordingly with fire actively coming off of the object. This corresponds to an object's Temperature value being above some threshold at the current timestep. Note that if True, this object becomes an active HeatSourceOrSink-enabled object that will raise the temperature of nearby objects.
|
|
ObjectsInFOVOfRobotA robot-specific state. Comptues the list of objects that are currently in the robot's field of view.
|
|
OpenWhether the object's joint is considered open or not. This corresponds to at least one joint being above some threshold from its pre-defined annotated closed state.
|

|
PoseThe object's current (position, orientation) expressed in (cartesian, quaternion) form in the global frame.
|

|
TemperatureThe object's current temperature. This value gets automatically updated every simulation step and can be affected by nearby HeatSourceOrSink-enabled objects.
|
|
ToggledOnA virtual button that can be "pressed" by a robot's end-effector. Doing so will result in the state being toggled between True and False, and also corresponds to a visual change in the virtual button's appearance.
|

|
RelativeObjectState
These are object states that are computed with respect to other entities in the given scene, and therefore, both the get_state(...) and set_state(...) take in additional arguments.
AttachedToDefines a rigid or flexible connection between this object and another object (parent). At any given moment, this object can only be attached to at most one parent, but the reverse is not true. That is, a parent can have multiple children, but a child can only have one parent. An attachment is triggered and created when the this object makes contact with a compatible parent and is aligned correctly.
|
|
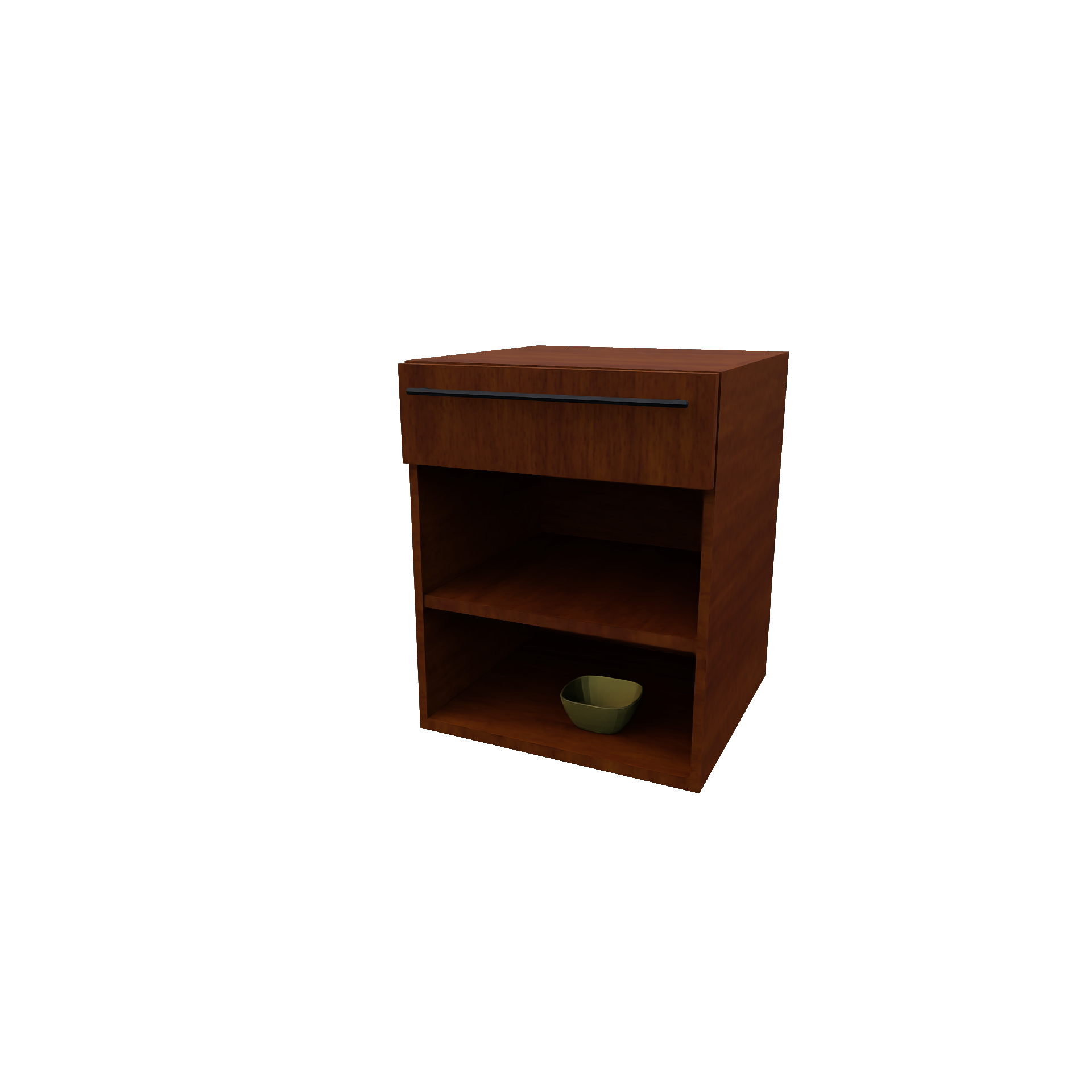
ContainsDefines whether this object currently contains any quantity of a specific particle system. Note that this state requires that a container virtual volume be pre-annotated in the underlying object asset for it to be created. Particles are considered contained if their position lies within the annotated volume.
|

|
CoveredDefines whether this object is currently covered by a specific particle system. This corresponds to checking whether the number of particles either touching or attached to this object surpasses some minimum threshold.
|
|
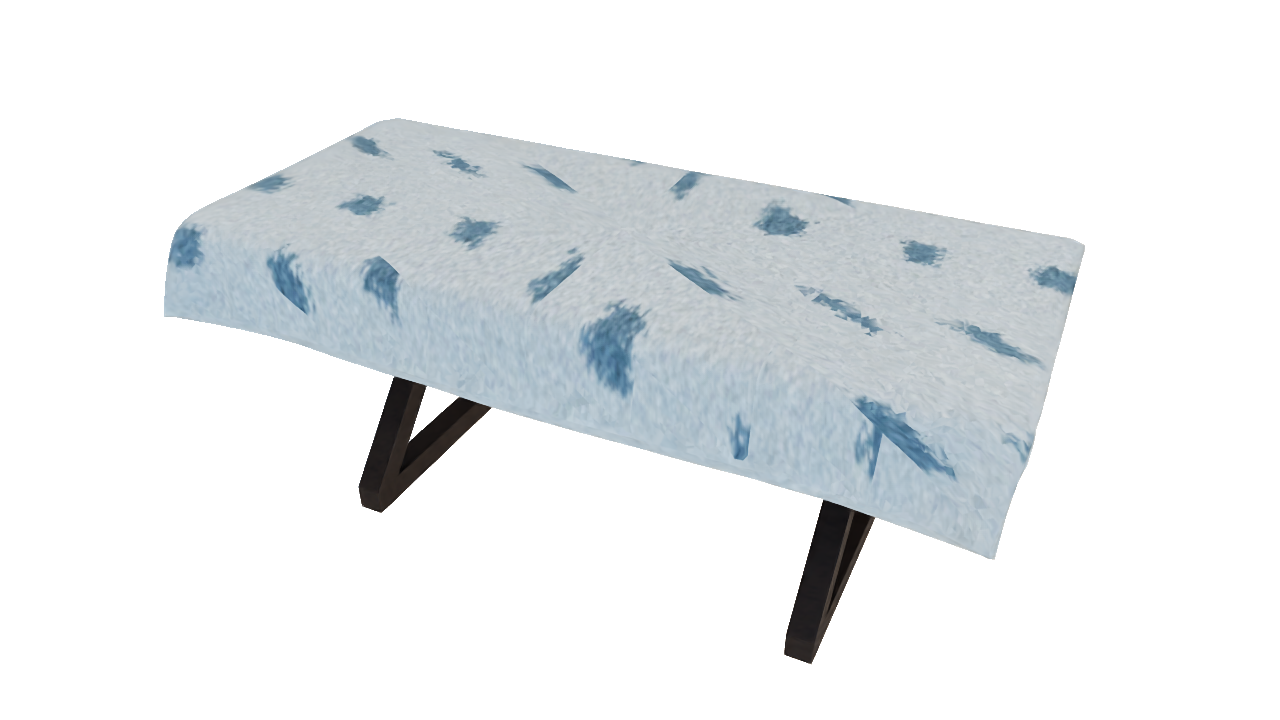
DrapedA cloth-specific state. Defines whether this cloth object is fully covering other, e.g., a tablecloth draped over a table. This object is considered draped if it is touching other and its center of mass is below the average position of the contact points.
|
|
FilledDefines whether this object is currently filled with a specific particle system. Note that this state requires that a container virtual volume be pre-annotated in the underlying object asset for it to be created. This state corresponds to checking whether the total volume of contained particles surpasses some minimum relative ratio with respect to its total annotated container volume.
|

|
InsideDefines whether this object is considered inside of other. This does raycasting in all axes (x,y,z), and checks to make sure that rays shot in at least two of these axes hit other.
|
|
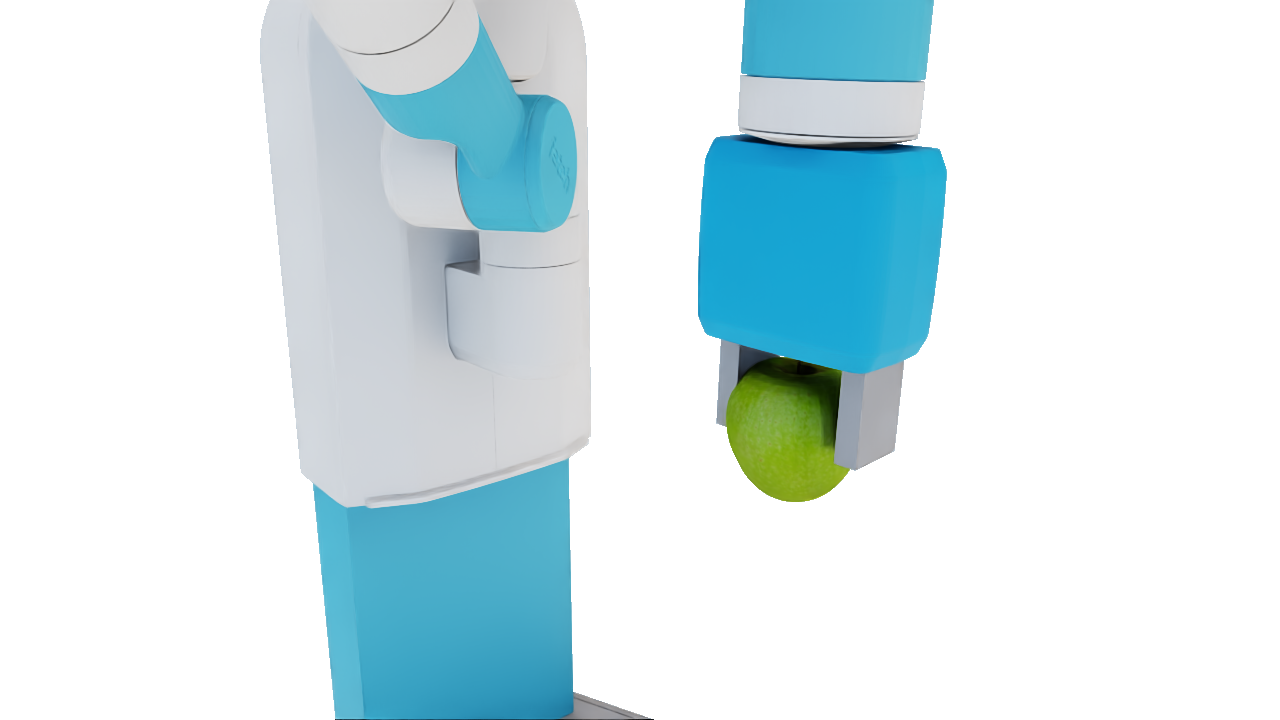
IsGraspingA robot-specific state. Determines whether this robot is currently grasping other.
|
|
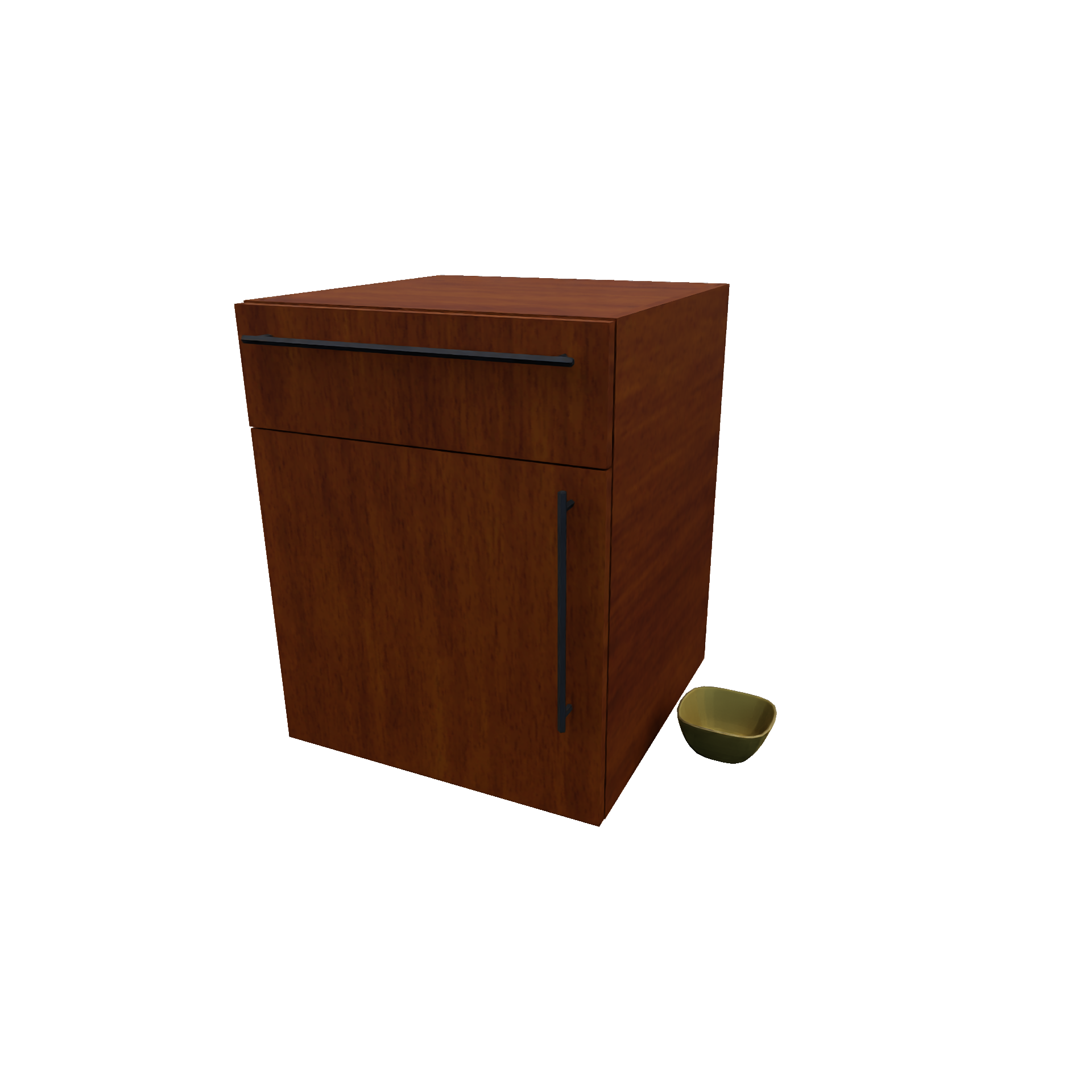
NextToDefines whether this object is considered next to other. This checks to make sure this object is relatively close to other and that other is in either of this object's HorizontalAdjacency neighbor lists.
|
|
OnTopDefines whether this object is considered on top of other. This checks to make sure that this object is touching other and that other is in this object's VerticalAdjacency negative_neighbors list.
|

|
OverlaidA cloth-specific state. Defines whether this object is overlaid over other, e.g., a t-shirt overlaid over a table. This checks to make sure that the ratio of this cloth object's XY-projection of its convex hull to other's XY-area of its bounding box surpasses some threshold.
|

|
SaturatedDefines whether this object has reached the maximum with respect to a specific particle system, e.g., a sponge fully absorbed with water, or a spray bottle fully emptied of cleaner fluid. This keeps a reference to this object's modified particle count for system, and checks whether the current value surpasses a desired limit. Specific limits can be queried via get_limit(system) and set via set_limit(system, limit). Note that if True, this object's visual appearance will also change accordingly.
|
|
TouchingDefines whether this object is in contact with other.
|

|
UnderDefines whether this object is considered under other. This checks to make sure that this object is touching other and that other is in this object's VerticalAdjacency positive_neighbors list.
|

|
IntrinsicObjectState
These are object states that that define intrinsic properties of the object and therefore do not implement get_state(...) nor set_state(...).
ParticleApplier / ParticleRemoverDefines an object that has the ability to apply (spawn) or remove (absorb) particles from specific particle systems. This state's conditions property defines the per-particle system requirements in order for the applier / remover to be active for that specific system. For example, a spray bottle that is a ParticleApplier may require toggled_on.get_value() to be True in order to allow cleaning_fluid particles to be sprayed, simulating a "press" of the nozzle trigger. The method flag in the constructor determines the applier / removal behavior, which is triggered only by direct contact with the object (ParticleModifyMethod.ADJACENCY) or contact with a virtual volume (ParticleModifyMethod.PROJECTION). The former captures objects such as sponges, while the latter captures objects such as vacuum cleaners or spray bottles. This object state is updated at each simulation step such that particles are automatically added / removed as needed.
|

|
ParticleSource / ParticleSinkDefines an object that has the ability to apply (spawn) or remove (absorb) particles from specific particle systems. The behavior is nearly identical to ParticleApplier / ParticleRemover, with the exception that contact is not strictly necessary to add / remove particles. This is to provide the distinction between, e.g., a particle source such as a sink, which always spawns water every timestep irregardless of whether its faucet volume is in contact with a surface, vs. a particle applier such as a spray bottle, which (for efficiency reasons) only spawns water if its virtual spray cone is overlapping with a surface.
|
|